Fencing Tokens and Generation Clock in .NET: Stop Zombie Leaders From Writing
Leader election and leases answer a comforting question: who should be in charge right now. They do not fully answer the dangerous question: who can still write right now. A node can lose its lease, another node can become leader, and the old leader can still push writes through an existing database connection. When that happens, your system is not …
Continue Reading
Stop Wrestling with JavaScript: htmxRazor Gives ASP.NET Core the Component Library It Deserves
Here is an uncomfortable truth the ASP.NET Core community has been avoiding for too long: server-rendered web development should not require you to adopt React, Vue, or Angular just to get a decent set of UI components. For years, .NET developers have been stuck choosing between two bad options. You can wire up Bootstrap by hand, bolting htmx attributes onto …
Continue Reading
Lease Pattern in .NET: A Lock With an Expiration Date That Saves Your Data
Indefinite locks belong to a world where processes never crash and networks never split. That world does not exist. In a distributed system, “I hold the lock” can mean “I held the lock before my VM paused for 45 seconds.” A lease fixes that by putting a deadline on ownership and forcing the owner to keep renewing that claim. A …
Continue Reading
Leader Election in .NET: Picking One Boss Without Creating Two
If your service runs on more than one node and still has a single instance assumption, you already have leader election. You just do not have it on purpose. Leader election is the pattern that turns “somebody should run this” into “exactly one node is allowed to run this, and it must keep proving it deserves the role.” This post …
Continue Reading
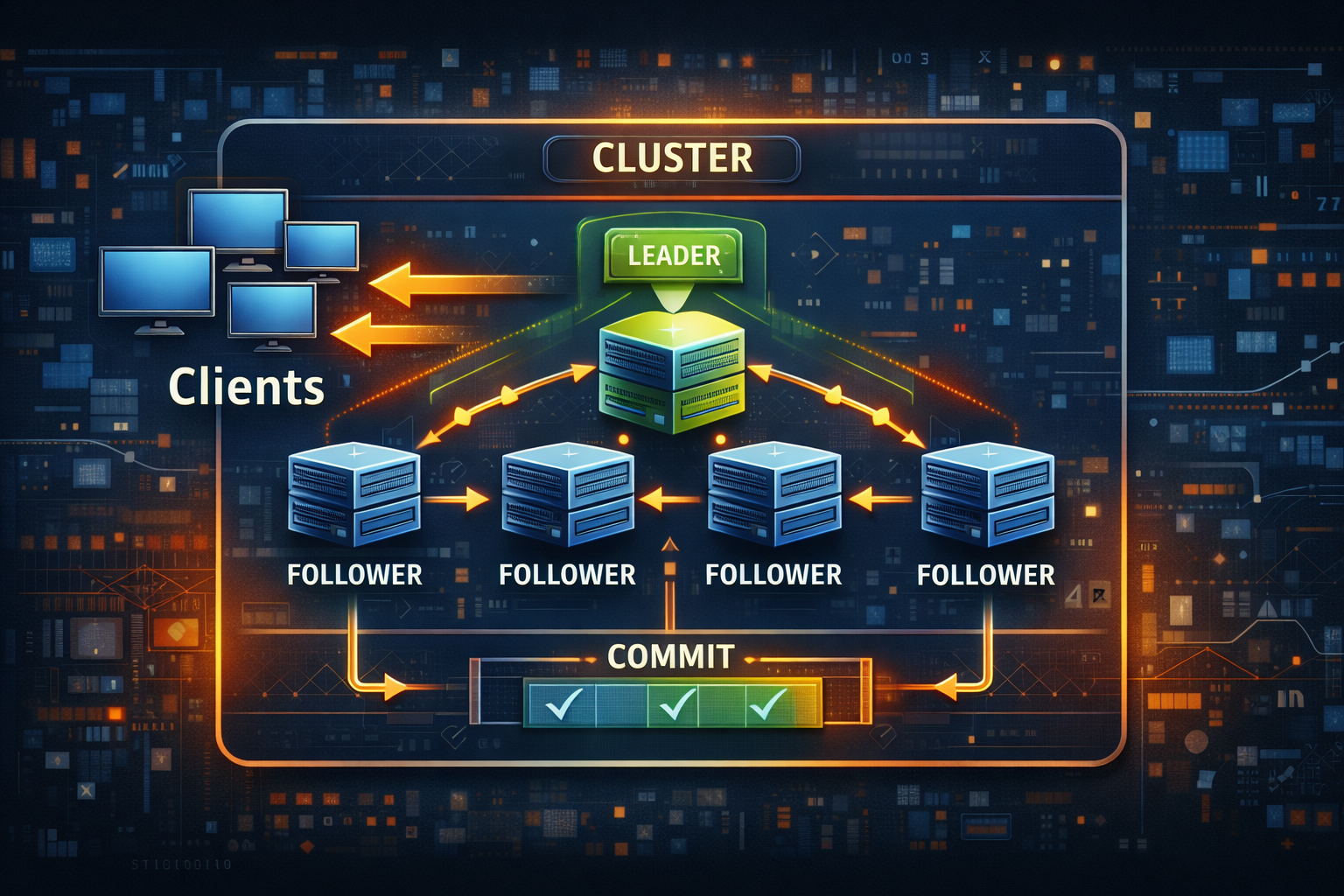
Distributed System Pattern: Leader and Followers in .NET – One Decision Maker, Many Replicas, Fewer Outages
Distributed systems rarely fail because you picked the wrong cloud service. They fail because two nodes believe they are in charge, both act, and both are “correct” from their own perspective. If your domain has any single authority assumption, and most systems do, you need a way to make that authority real. Leader and Followers is the pattern that turns …
Continue Reading
Patterns of Distributed Systems in C# and .NET: A New Series for People Who Ship Real Systems
Distributed systems do not fail because you missed a feature. They fail because responsibility is unclear. Two nodes act, both think they are right, and your data becomes a debate. This series is my pushback against cargo cult architecture. We are going to talk about the small, repeatable techniques that stop outages, not the buzzwords that decorate slides. Unmesh Joshi’s …
Continue Reading
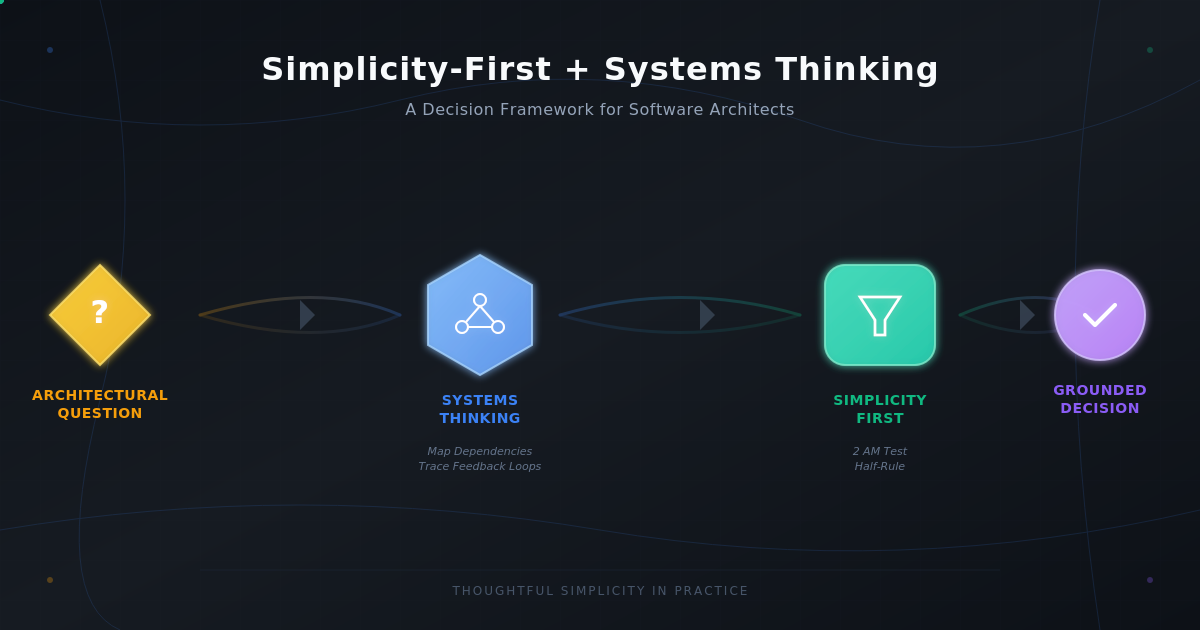
Systems Thinking Meets Simplicity-First: A Decision Framework for Software Architects
Modern technology operates in a paradox. Our tools have never been more powerful, yet our systems have never felt more fragile. Every framework, pipeline, and process claims to simplify development, but most end up multiplying dependencies and eroding clarity. In that chaos, two guiding philosophies emerge: Systems Thinking and Simplicity-First. At first glance, they seem to occupy opposite ends of …
Continue Reading
Enterprise Patterns for ASP.NET Core Minimal API: Data Transfer Object Pattern
-
Chris Woodruff
-
January 19, 2026
-
Patterns
-
0 Comments
Your domain model exists to protect your business rules.Your API exists to protect your clients. When you expose EF Core entities directly from your ASP.NET Core endpoints, you throw both of those protections away. The Data Transfer Object Pattern (DTO) is the line in the sand. DTOs carry data across boundaries. They flatten and optimize your internal objects for remote …
Continue Reading
Stop Building SPAs for Every Screen: htmx + ASP.NET Core Razor Pages Workshop (Open)
If your default move for “modern UX” is a SPA, you are paying a tax you do not need. You pay for it in build pipelines, duplicated validation rules, fragile client state, and a front end that turns routine CRUD into an engineering project. This workshop is a different bet. We keep the server in charge, keep HTML as the …
Continue Reading
Enterprise Patterns for ASP.NET Core: Front Controller and MVC Pattern
If every controller in your system does its own authentication, logging, and error handling, you do not have an architecture. You have a crowd of small frameworks pretending to cooperate. Front Controller and MVC are the patterns that push back against that drift. In ASP.NET Core, the pipeline and routing already give you a natural front controller. The real question …
Continue Reading